BlueDCC Bluetooth Low Energy DCC
Pocket Power Pack 3P
* Battery operated (LiPol single cell) * Built in USB charger * Up to 0.5 A * Maximum DC adjustable from 6 to 15 V * PWM from 25 Hz to 16 KHz * BLE * Displays voltage and current
Controller
Motorentreiber
- DRV8871 Adafruit Breakout Board 3190
- https://learn.adafruit.com/improve-brushed-dc-motor-performance

Strommessung
DCDC Aufwärtswandler
LiPo (3.3 bis 4.2 V) auf 12 V- TRACO sind eigentlich erst ab 4.5 V
- Purecrea MT3608 Digitec, https://www.olimex.com/Products/Breadboarding/BB-PWR-3608/resources/MT3608.pdf, bastelgarage.ch 3.90 CHF
LiPo Ladegerät
- Adafruit MicroLipo 100/500 mA
DCC-BLE Gateway
BLE-DCC Gateway
- Pros
- Sound und Motorenansteuerung ist durch Lok-Dekoder gelöst z.B. Soundtraxx, Digitrax, Lenz, Zimo, Uhlenbock usw.
- Bestehende DCC-Loks können angepasst werden
- Betrieb DC und DCC weiterhin möglich
- Batteriebetrieb Dead Rail
- Akku könnte geladen werden
- Programmier- und Hauptgleis muss nicht unterschieden werden, es wird jeweils nur ein Dekoder angesteuert
- Cons
- zwei PCBs
- auf Möglichkeiten des DCC beschränkt
- Beispiel Technische Realisierung
- Gleichrichter
- BLE Peripheral z.B. BL652
- Mini-Booster 1 A, Peak 3 A, full bridge TI DRV8871
Bidirektionale Kommunikation
Ist das überhaupt nötig? Es ist ja nur ein Dekoder angeschlossen und es kann davon ausgegangen werden, dass die Kommunikation klappt. Doch ein Zurücklesen von CVs wäre trotzdem schön.ACK CV read-back
Kurzzeitige Stromerhöhung um etwa 60 mA. Braucht eine Strommessung auf der Seite des Gateways. Strommessung wäre auch interessant für die Überwachung des Dekoders bzw. des Motors. Nur während der Programmierphase. https://dccwiki.com/Decoder_ProgrammingRailCom AKA DCC-BiDi
https://www.opendcc.de/info/railcom/railcom.htmlDigitrax Transponding
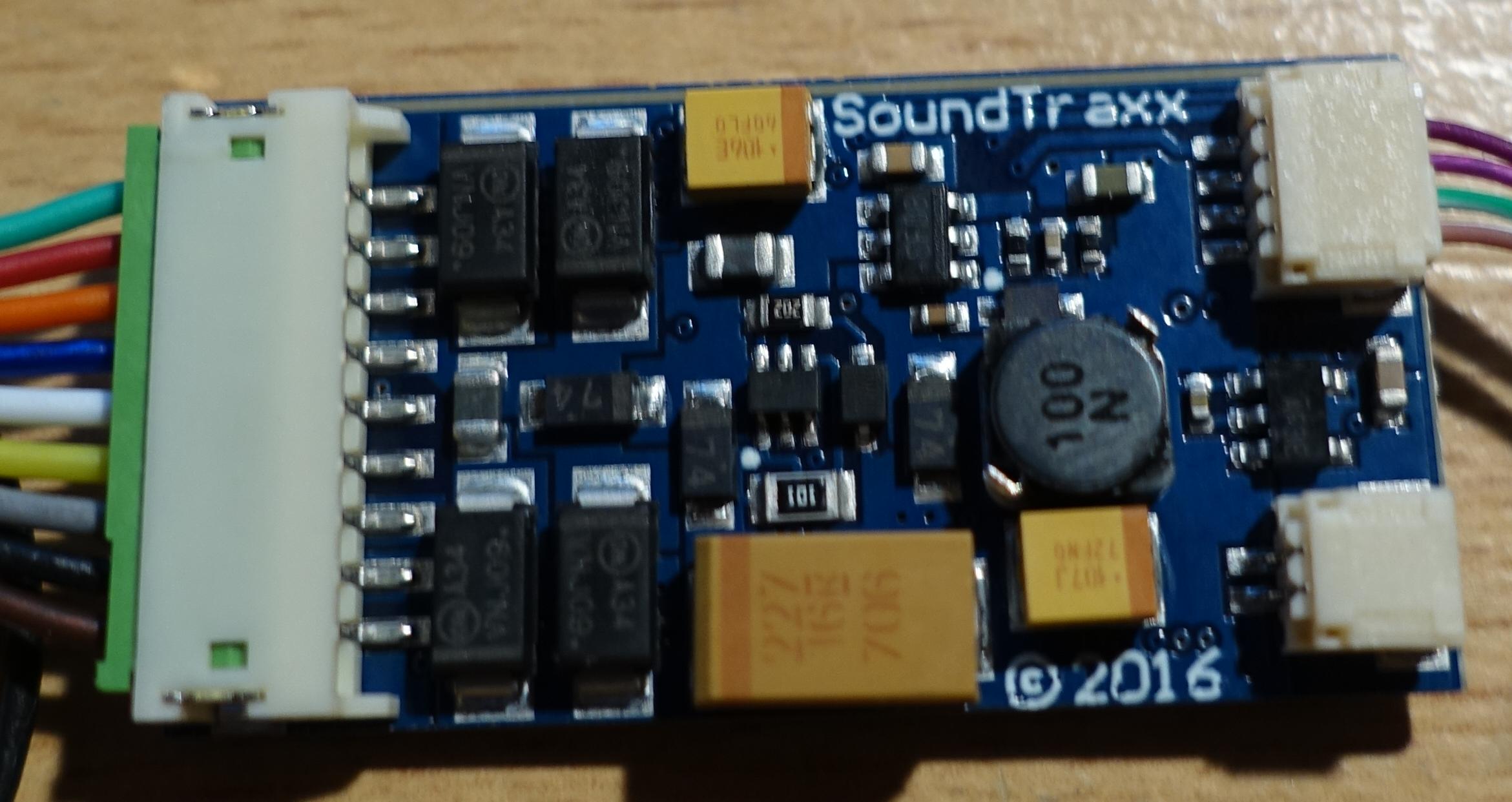
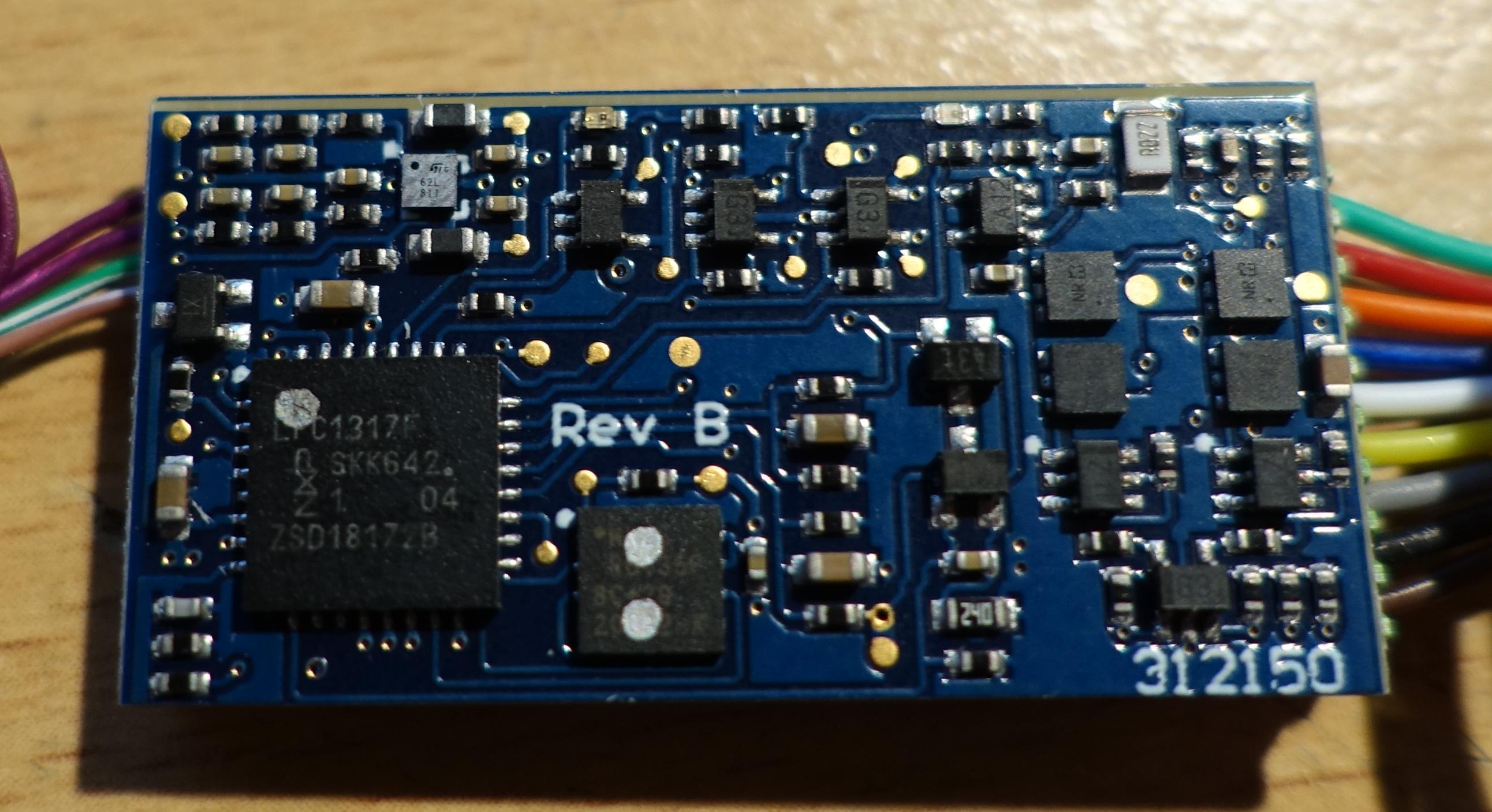
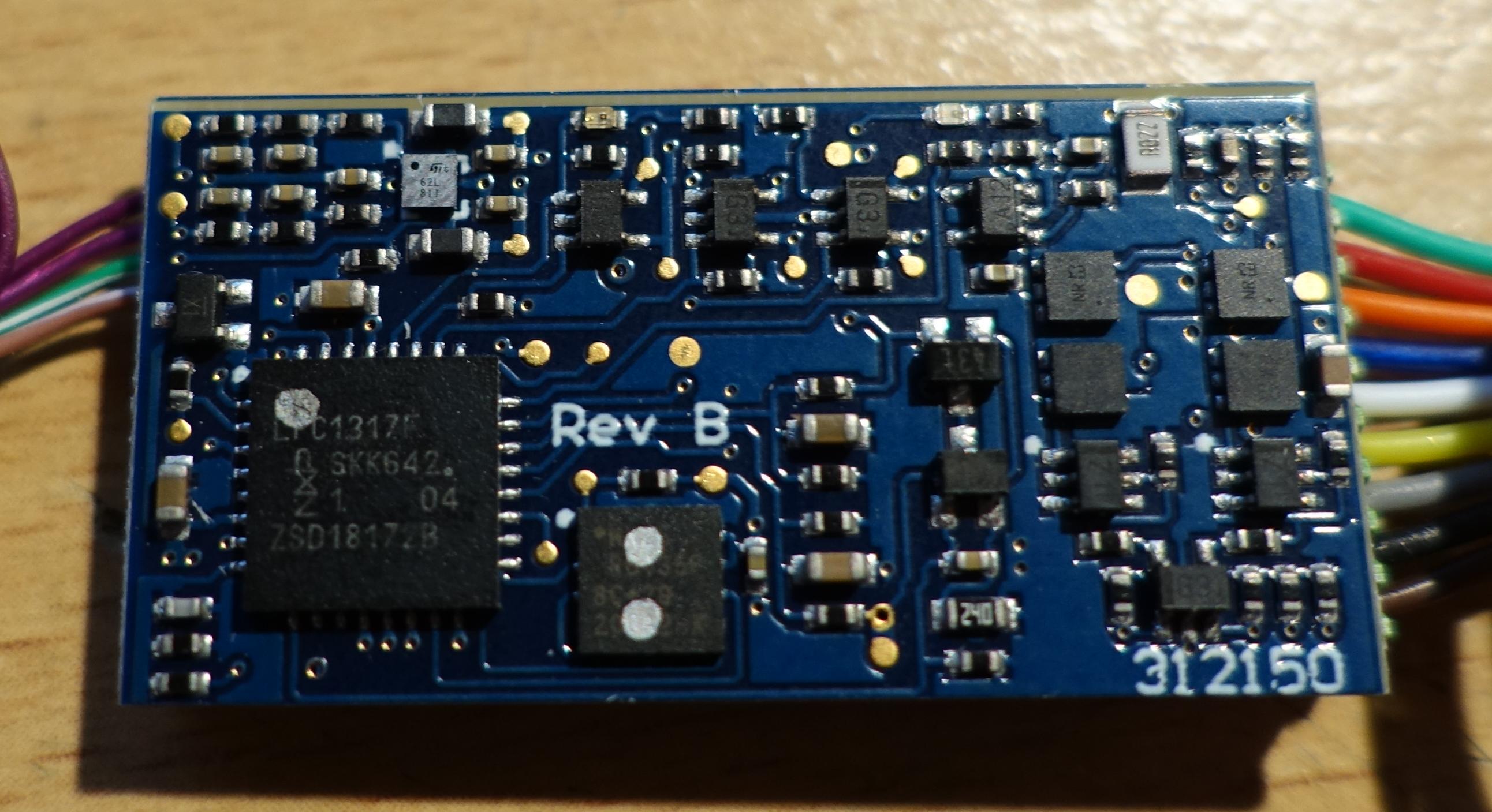
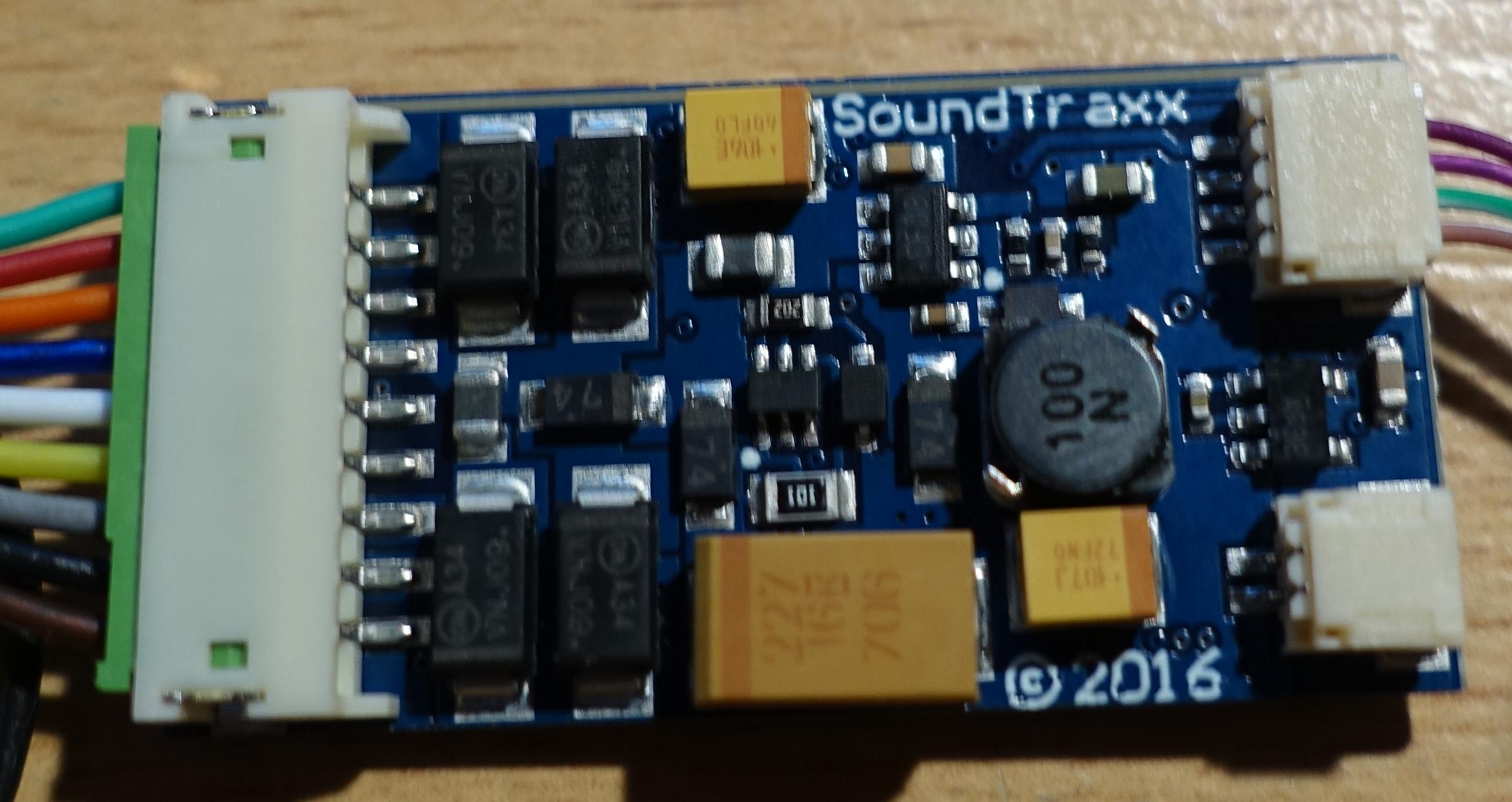
Proprietäre Technologie von Digitrax. Die Präambel wird wird durch den Dekoder moduliert. Einzig Soundtraxx unterstütz auch noch diese Technologie.Sample Locomotive Decoder Soundtraxx TSU 2200
Wiring Diagrams Tsunami2 and Econami Installation Guide 18 TSU 2200/ECO Pin JST plug for easy installation in many DCC ready models. Wires are color-coded according to the NMRA Standard (where applicable): Power, Motor, Headlight, and Backup Light Wires:- Black: Left Rail Pickup Gray: Motor (-)
- Yellow: Backup Light
- White: Headlight
- Green/Yellow Stripe: Ground
- Blue: Function Common (12V)
- Orange: Motor(+)
- Gray: Motor (-)
- Red: Right Rail Pickup
- Purple: Speaker (+)
- Purple: Speaker (-)
- Green: FX3
- Brown: FX4
- Green/White Stripe: FX5
- Brown/White Stripe: FX6
 |
 |
Elektronische Schwungmasse
U = 10 V I = 100 mA t = 100 ms R = U / I = 10 V / 100 mA = 100 Ohm C = t/100 = 1000 uF
Open Source DCC, Doku
- http://jmri.org
- https://dccwiki.com/Main_Page
- https://www.morop.org/index.php/de/nem-normen.html
- https://github.com/ZIMO-Elektronik/DCC
- https://normen.railcommunity.de/RCN-211.pdf
Kommerzielle BLE DCC
- Bachmann E-Z App Touch-Screen Control http://e-zapptraincontrol.com
- http://bluerailtrains.com/
- http://monocacytrains.com/
- http://sprog.us.com
Lok-Dekoder mit BLE Interface
These systems work by installing a receiver board in the locomotive that acts as both a radio receiver and a miniature DCC command station/booster- https://www.on30guy.com/dead-rail-primer/which-dead-rail-system-is-for-you/
- https://dccwiki.com/Main_Page
- Soundtrax
- http://www.digitrax.com
BLE Test App
CLI: Laird Toolkit Serial (VSP)Raspi
PWM auf BL652
Jeder Output-Pin kann mit PWM betrieben werden.- Gleisspannung wird gleichgerichtet
- ein LiPo Akku mit 3.7 V Nominalspannung
- LiPo Akku Renata ICP641414PE 15 x 17 x 7 mm, etwa 100 mA dauernd (30 mA @ 12 V)
- LiPo Akku Renata ICP402050PR.pdf 20 x 50 x 4.5 mm, etwa 400 mA dauernd (130 mA @ 12 V)
- LiPo Akku Renata ICP641414PE
- Ab 5 V wird Gleisspannung verwendet, DC/DC Wandler 5..12 V auf 5 V (abwärts). Bei 500 mA 12 V Motor braucht es etwa 1.5 A, bei 200 mA etwa 600 mA, bei 100 mA etwa 350 mA
- AP5100WG-7, https://www.diodes.com/assets/Datasheets/AP5100.pdf
- LM5165DRC http://www.ti.com/lit/ds/symlink/lm5165.pdf (wird in GAM Prototyp 2 eingesetzt)
- MCP16301T-I/CHY,
- LT3973IMSE-5 https://www.distrelec.ch/Web/Downloads/_t/ds/lt3973_eng_tds.pdf 4.5 .. 42 V -> 5 V .75 A, 3 x 5 mm
- 15 uH 1.5 A Induktivität, SMD 15 uH 1.8 A ±20%, SRN6028-150M, Bourns 300-26-211
- Induktivität, SMD 15 uH 2 A ±20%, 74404054150, Würth Elektronik 300-41-971
- 4.7 uF in, 22 uF out
- TPS562201 http://www.ti.com/product/TPS562201 2A
- TPS561201 http://www.ti.com/product/TPS561201 1A
- TPS63070 webbench
- AP5100WG-7, https://www.diodes.com/assets/Datasheets/AP5100.pdf
- DC/DC Wandler für 3..12 V auf 12 V (aufwärts)
- LM27313 http://www.ti.com/product/lm27313/description 800 mA SOT-23-5, Distrelec 300-19-316, etwa 200 mA @ 12V
- Induktivität, SMD 10 uH 1 A ±20%, SRN3015-100M, Bourns, 110-96-819
- SMD-Schottky-Barrier-Diode 1 A 40 V SMAF, RND SS14F-AT, 300-93-055
- 2.2 uF 10 V
- 4.7 u
- LMR62014 http://www.ti.com/product/lmr62014 bench 1.8 A SOT-23-5, Distrelec 300-19-565, etwa 500 mA @ 12 V
- LT1930ES5 SOT-23-5 5 V -> 12 V 0.3 A
- LM27313 http://www.ti.com/product/lm27313/description
- IO GATT Service Analog Out für Motor, Digital Out für Licht
- DC Variante mit ADC ab 5 V
- abbrechbarer Print mit 10 Pin JTAG/SWD Stecker inkl. UART. J-Link Lite ST-Link haben dieses Feature nicht. Aber z.B. Cypress, STM Nucleo und NXP (Freescale) FRDM haben UART integriert sind aber nicht Segger J-Link kompatibel.
- Evalboard https://www.chip45.com/products/up2net_ble_dwarf_bluetooth_4_nfc_bl652_module_iot_evalboard.php
- Grösse
- etwa 19 x 21 mm (für HOn30 Führerhaus Dampflokomotive)
- etwa 19 x 40 mm (kleiner Tender)
- Motor, sehr klein 12 x 17 mm, max. 600 mW, bei 12 V 50 mA


This work by Peter Schmid is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
TSU-2200-bottom.jpg | r1 | manage | 378.4 K | 2018-12-14 - 21:30 | PeterSchmid | |
| |
TSU-2200-top.jpg | r1 | manage | 264.1 K | 2018-12-14 - 21:30 | PeterSchmid |
Topic revision: r11 - 2025-04-22 - PeterSchmid


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback